| 聯系方式 |
 |
杭州易測計量設備有限公司 地 址:杭州市余杭區北沙西路152號 聯系人:王經理 電 話:0571-85108155 傳 真:0571-85105122 手 機:18094712401
|
|
| ? |
稱重傳感器作為動態地磅的核心部件,一旦發生故障將會對動態稱重系統造成嚴重影響。為了準確地對稱重傳感器進行故障診斷,提出了一種基于小波變換和深度信念網絡( DBN) 的故障診斷方法。該方法不僅可以有效地判斷出傳感器信號是正常波動還是故障,還可以通過將 DBN 模型的預測值代替實測故障值,保證動態稱重系統輸出的準確性。通過仿真實驗證明: 該方法能夠對故障傳感器進行判別與估計,有效提高了動態稱重系統的精度。
0引言
稱重傳感器作為動態地磅的重要組成部分,其工作的準確性和穩定性直接關系到整個動態稱重系統的可靠運行。由于動態地磅每天要經受成千上萬次的不均沖擊,并且稱重傳感器的使用環境不密封,易受外界環境因素影響,容易造成傳感器的形變和損壞,使傳感器的性能出現退化或者故障,因此,定期對傳感器進行檢測和校準非常有必要。但由于人工檢測和校準存在操作上的難度,眾多學者將各種智能算法應用到地磅傳感器的故障診斷中。文獻分別將專家系統和徑向基函數神經網絡引入地磅傳感器故障診斷中,能夠較準確地判定傳感器的好壞并預測異常信號的正常值。但是動態稱重傳感器的輸出信號出現異常并不一定都是由于傳感器故障造成,也有可能是系統的正常波動造成的,以上算法并不能對兩種情況作出準確的判斷。
文獻指出小波變換后信號的局部極大值對應系統中的突變點,并對如何求取小波變換分解層數和閾值選擇進行了深入研究。基于此,本文將動態稱重傳感器的信號進行小波變換,通過高頻信號的局部極大值得到信號的突變點。用深度信念網絡(deep belief network,DBN)建立起傳感器的輸入輸出模型,,通過選擇合適的故障閾值,判別突變點對應的傳感器是故障還是系統波動,并且通過其他傳感器的信號值預測出正常情況下故障傳感器的輸出,實現了動態地磅的容錯控制,保證了稱重系統的準確性和穩定性。
1.動態地磅
動態地磅主要由稱重傳感器、秤體、接線盒和電子稱重儀表等構成,與車輛分離器、輪軸識別器和計重柜共同構成稱重系統。根據設計的稱量量程,動態汽車衡稱重傳感器數量一般為 8 ~ 20 只,一般選用橋式稱重傳感器,這些傳感器按一定的拓撲結構分布在動態地磅秤臺臺面的下方。現在以 18 m 長整車式動態地磅為例,共包含 16 只稱重傳感器,具體分布如圖 1 所示。
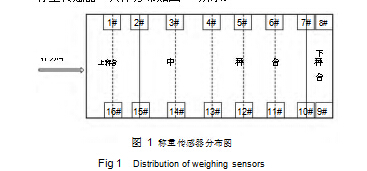
整車式動態地磅秤體由上秤臺、中間秤臺和下秤臺構成,上秤臺、中間秤臺和下秤臺分別由 4 只、10 只和 2 只稱重傳感器支撐,傳感器的擺放位置為 1# ~ 16#。
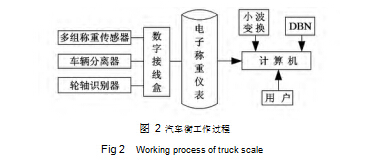
整車式動態地磅工作流程如圖 2,當車輛經過動態地磅時,車輛分離器、輪軸識別器和多組稱重傳感器采集信號,將采集到的信號經由數字接線盒傳到電子稱重儀表,電子稱重儀表將信號上傳給計算機,計算機通過小波變換和 DBN 對故障的傳感器進行判斷并預測出正常情況下信號的估計值,取代故障值,從而為動態稱重系統提供較準確的輸出。
2.故障診斷系統
2. 1 小波變換
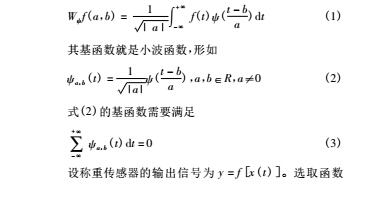
小波變換源于 Fourier 變換,是一種具有多分辨率分析的時間—頻率分析方法,通過取不同寬度的基函數,實現對原始信號在時域、頻域的分解 。小波變換具體公式為
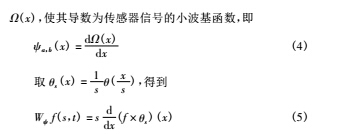
由式( 5) 可以得到,其局部極大值對應著 f × θ 函數中增長最快的部分,亦即對應著傳感器輸出信號的突變值。對于動態稱重系統中的任意傳感器 i,取其小波變換后的信號為 Si ,閾值為 λi ,當 Si > λi 時,便認為傳感器 i 的信號發生了突變。但造成突變的原因并不能確定,是系統的正常波動還是稱重傳感器故障造成的,需要進一步的進行分析。
2. 2 DBN
考慮到整車式地磅是由 16 只動態稱重傳感器構成,并且各個稱重傳感器狀態之間擁有固定的函數關系,所以,可以利用 DBN 來模擬各傳感器之間的關系。DBN 可以看作是帶有已訓練的初始權值的神經網絡,由若干個受限玻耳茲曼機( RBM) 組合而成的,圖 3 是由 2 個 RBM 構成的DBN,其下層的 RBM 的輸出層是上層 RBM 的輸入層。
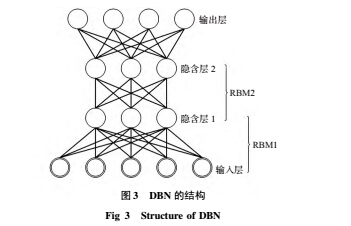
RBM 可以采用對比散度法實現逐層訓練,以達到理想的訓練精度。
利用 DBN 實現傳感器故障診斷時,只考慮有 1 只稱重傳感器出現故障的情況。具體故障診斷過程如下:
1) 利用 16 只稱重傳感器在正常工作狀態下的數據作為訓練集對 DBN 進行訓練。以其中 1 只傳感器的信號為輸出,其他 15 只傳感器的信號為輸入,這樣就可以得到16 只稱重傳感器的 DBN 網絡訓練模型。
2) 將小波變換鑒別出的可能出現問題的稱重傳感器 i作為待檢測的傳感器。將其他 15 只傳感器的信號作為輸入得到第 i 個 DBN 模型的輸出,估計第 i 只傳感器正常工作時的輸出值據 yp_i 。
3) 根據實際經驗,人工設定傳感器 i 的故障閾值 wi 。
通過比較傳感器的實際輸出 yr_i 與預測輸出 yp_i 的差值與故
障閾值 wi 的關系來判定傳感器 i 是否發生故障。若 | yr_i -
yp_i | > wi ,則認為傳感器發生故障; 反之,認為傳感器沒有發生故障,只是正常的系統波動。
4) 為了保證動態稱重系統的正常運行,若傳感器發生故障,用故障傳感器 i 的預測值 yp_i 代替此時的實際輸出yr_i 。
利用此方法進行整車式地磅故障診斷,不僅能夠有效地區分傳感器故障和傳感器正常波動,還能通過 DBN 訓練模型預測的故障傳感器的輸出代替故障值,保證地磅的正常使用。
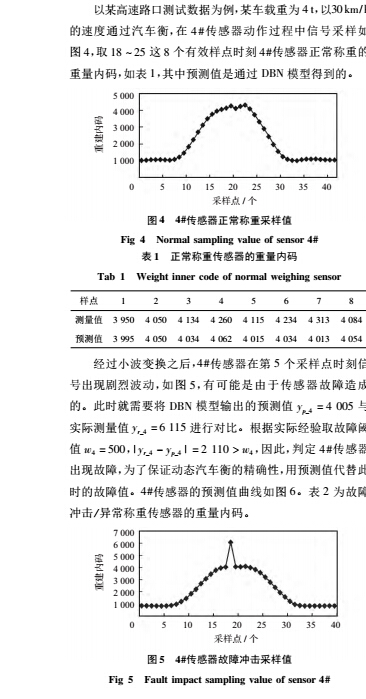
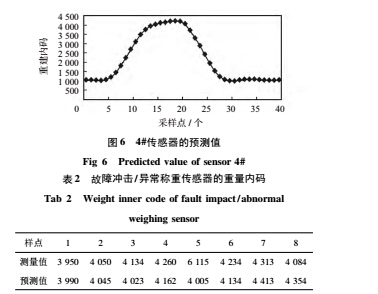
3 .實驗測試
4.結論
為了有效實現對動態地磅稱重傳感器的故障診斷,本文提出了一種基于小波變換和 DBN 的稱重傳感器故障診斷方法。首先將傳感器信號進行小波變換,通過高頻信號中的突變值找到對應傳感器。然后通過 DBN 預測模型計算出該傳感器的預測值,通過實測值與預測值的對比,判斷傳感器信號是正常的系統波動還是發生故障,如果是傳感器故障,則用預測值代替實測值,保證稱重系統運作的精確性。測試證明: 該方法具有較高的故障診斷準確率,實現了動態地磅的容錯控制。
|
|
上一篇:淺談數字地磅故障分析與處理
下一篇:汽車衡加載狀態與檢定結果研究
|
|